Soft Robotics Revolutionise Minimally Invasive Surgery
Professor Kaspar Althoefer from Queen Mary University of London has made groundbreaking advancements in the field of soft robotics for minimally invasive surgery
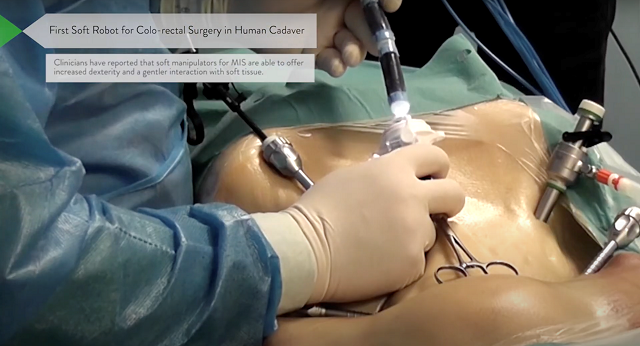
First soft robot for colo-rectal surgery in human cadaver. Credit by: STIFF-FLOP
An overview paper, published in the Science journal today, explores Artificial intelligence (AI) applications in medical robots, including Professor Althoefer’s scientific research unlocking the potential of flexible and adaptable surgical robots to revolutionize surgical procedures.
Robot-assisted minimally invasive surgery (RAMIS) has seen significant progress in recent years. These systems utilize slender instruments to operate through small incisions, providing surgeons with improved ergonomics and 3D vision. However, current RAMIS platforms often face limitations due to their rigid component design, making it challenging to access certain areas of the body and potentially causing tissue injuries.
Soft robotics offers a promising solution to these challenges. By utilizing materials that can deform, bend, shrink, and change stiffness, soft robots can perform surgical procedures with enhanced dexterity and safety. These robots can be designed for various body regions and applications, including diagnosis and intervention.
For instance, a fluid-driven soft robotic system has been developed to increase patient comfort during ear therapy and precisely guide a needle to the desired injection site. Soft robots also hold great potential for diagnosing gastrointestinal tract pathology, as these tissues are flexible and highly deformable. A recent demonstration showcased a capsule robot for endoscopy that utilizes eversion navigation and a soft shape-shifting mechanism.
“The European Union project STIFF-FLOP, that we started in 2012, played a crucial role in advancing soft robotics for RAMIS. I created the term STIFF-FLOP back then, and it is today being used to describe soft robot manipulators made up of biocompatible silicone rubber with inflatable chambers inside. Researchers around the world now call this type of robots STIFF-FLOP manipulator or, just, STIFF-FLOP – and I am very delighted to have introduced the term to the robotics community”, says Professor Althoefer, “Additionally, state-of-the-art machine learning techniques allowed intuitive teleoperation of the soft robots within the patient's abdominal cavity, while haptic systems enabled surgeons to interact with the robot and the soft tissue environment.”
Despite the progress made, there are still significant technical challenges to overcome. Precision and accuracy remain major concerns in soft robotic systems, as their movements rely on the deformation of materials rather than rigid components. To address this, advanced strategies based on artificial intelligence, machine learning, and data-driven control are being developed. Recent advancements in computer power, computer vision, real-time modeling, and simulation show promise in enabling surgeons to operate soft robots without extensive training sessions.
Professor Althoefer's research opens up new possibilities for safer and more effective minimally invasive surgery. “By harnessing the potential of soft robotics, surgeons can access previously challenging areas of the body with enhanced precision and accuracy. We hope this work paves the way for a future where surgical procedures are revolutionized by the power of soft robotics”, concludes Kaspar Althoefer.
Related items



23 October 2024